|
Jingxiang Guo | 郭京翔 I am a fourth-year undergraduate student majoring in Automation at Harbin Institute of Technology, Shenzhen. Currently, I am fortune to be a research assistant at National University of Singapore advised by Prof. Lin Shao. Previously, I was an intern at Harbin Institute of Technology, Shenzhen RLGroup advised by Prof. Yanjie Li. Email / CV / GitHub / Google Scholar / ORCID / IEEE Xpolre / Semantic Scholar / dblp / Scopus / ResearchGate / LinkedIn / Gravatar / WeChat
×

|

|
News
|
Research
My research interests lie in 🤖robot learning ,🦾dexterous manipulation and 🤝Human-Robot Perception Alignment. |
|
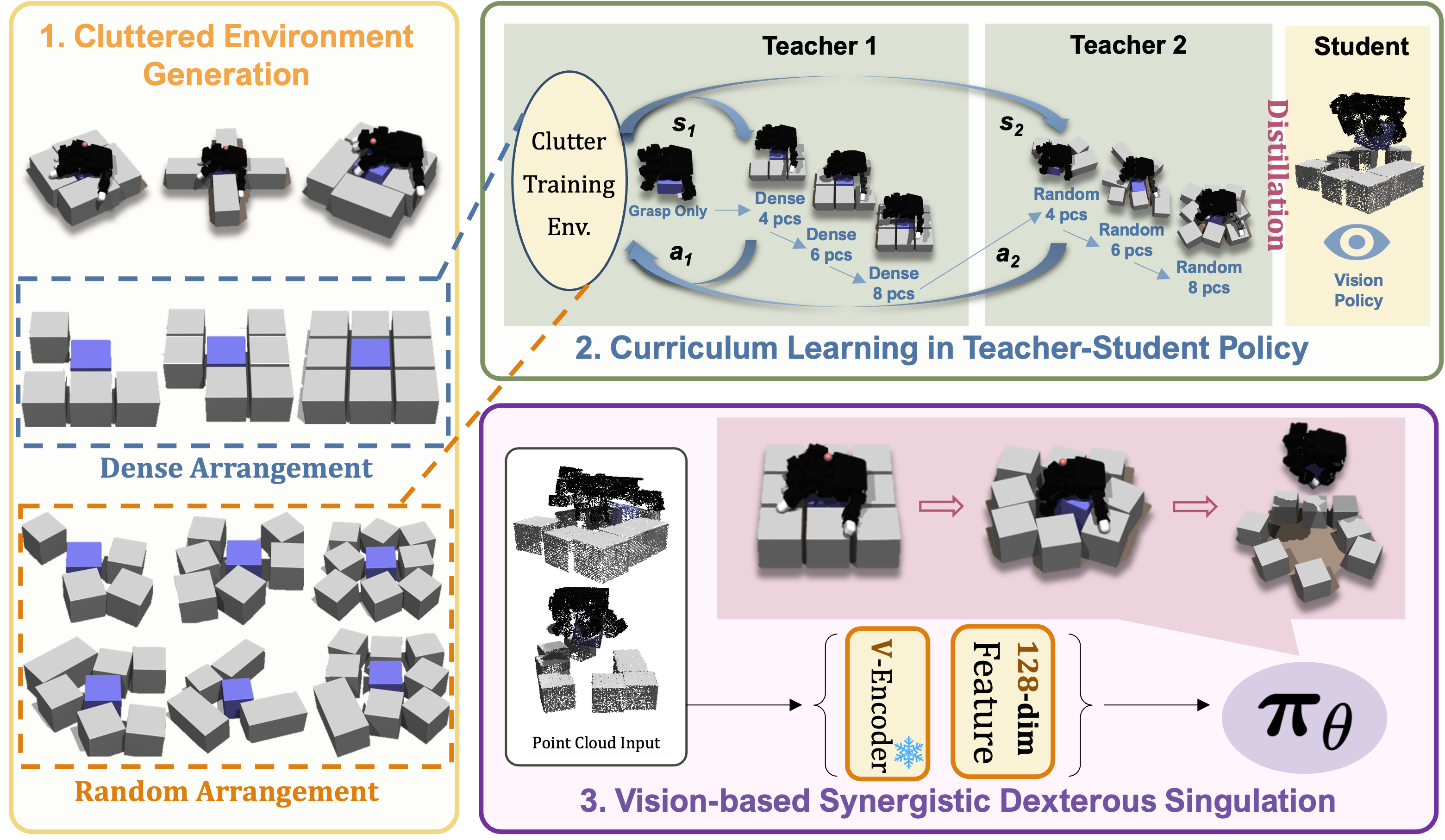
DexSinGrasp: Learning a Unified Policy for Dexterous Object Singulation and Grasping in Cluttered Environments
In submission to IROS Website / arXiv / Code |
|
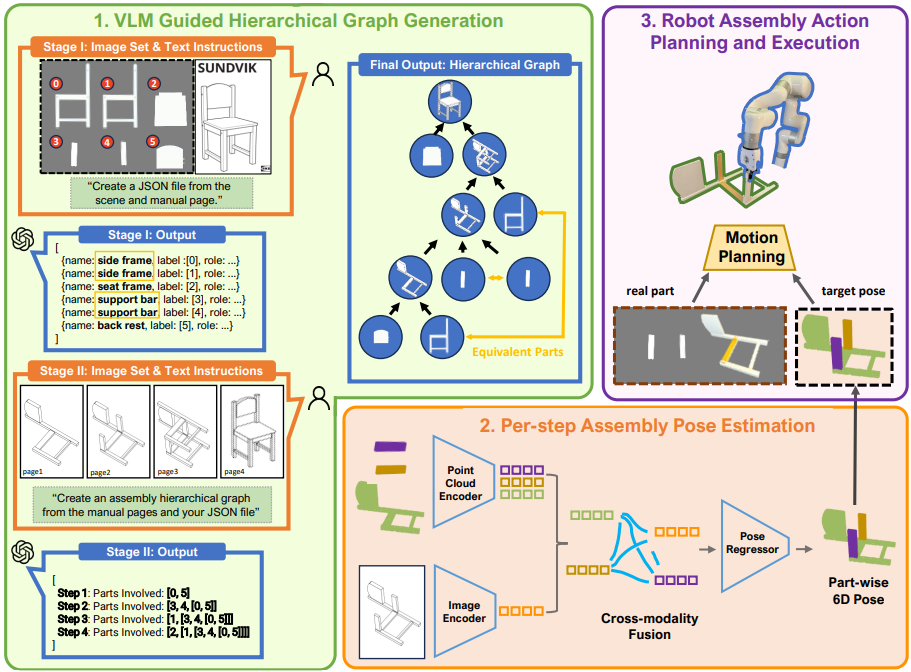
Manual2Skill: Learning to Read Manuals and Acquire Robotic Skills for Furniture Assembly Using Vision-Language Models
RSS 2025 Website / arxiv / Code |
|
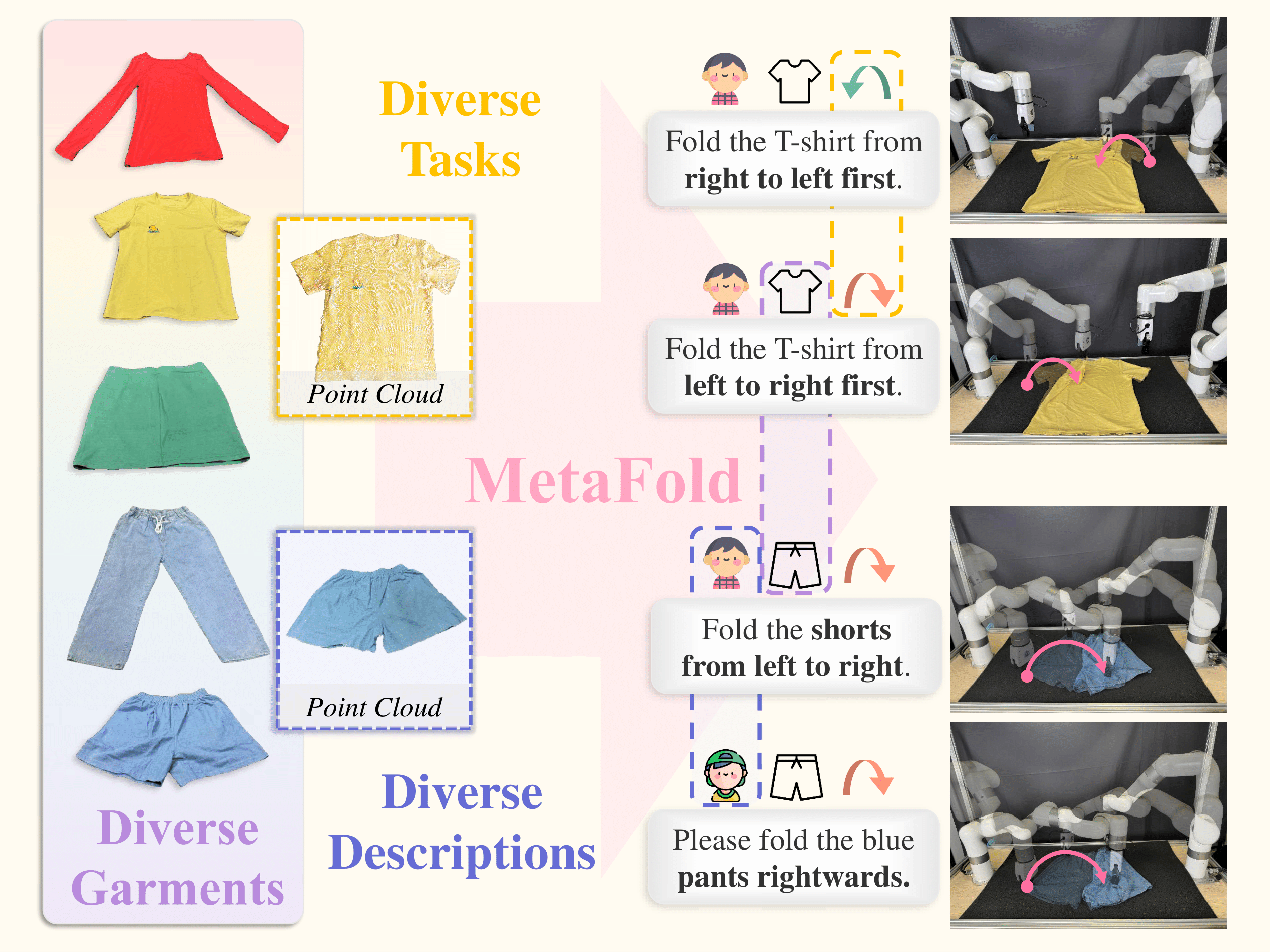
MetaFold: A Closed-loop Pipeline for Universal Clothing Folding via End-to-end Point Cloud Trajectory Generation
In submission to IROS Website / arxiv / Code |

|
TelePreview: A User-Friendly Teleoperation System with Virtual Arm Assistance for Enhanced Effectiveness
, , , , , , , Website / arXiv / Code (Coming soon)
In submission
TL;DR:
Implement a low-cost teleoperation system utilizing data gloves and IMU sensors, paired with an assistant
module that improves data collection process by visualizing future robot operations through visual previews.
|
|
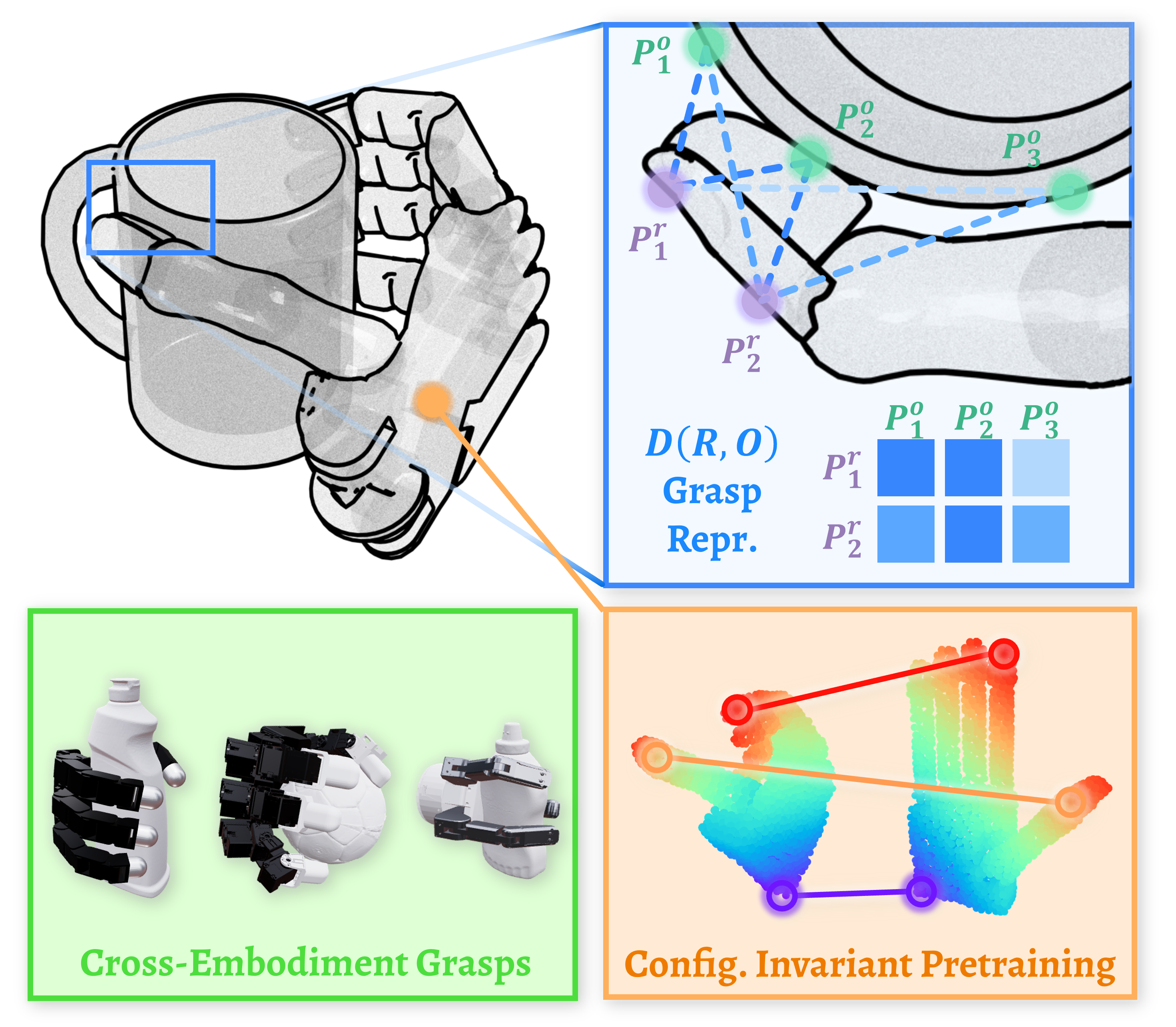
$\mathcal{D(R,O)}$ Grasp: A Unified Representation of Robot and Object Interaction for Cross-Embodiment Dexterous Grasping
*, *, , , , , , Website / arXiv / Code
ICRA 2025 Best Paper Award Finalist
CoRL 2024 @ MAPoDeL 🏆 Best Robotics Paper Award (Oral Presentation) CoRL 2024 @ LFDM ⭐️ Spotlight Presentation ⭐️
×
TL;DR:
Introduce $\mathcal{D(R,O)}$, a novel interaction-centric representation for dexterous grasping tasks that
goes beyond traditional robot-centric and object-centric approaches, enabling robust generalization across
diverse robotic hands and objects.
|
|
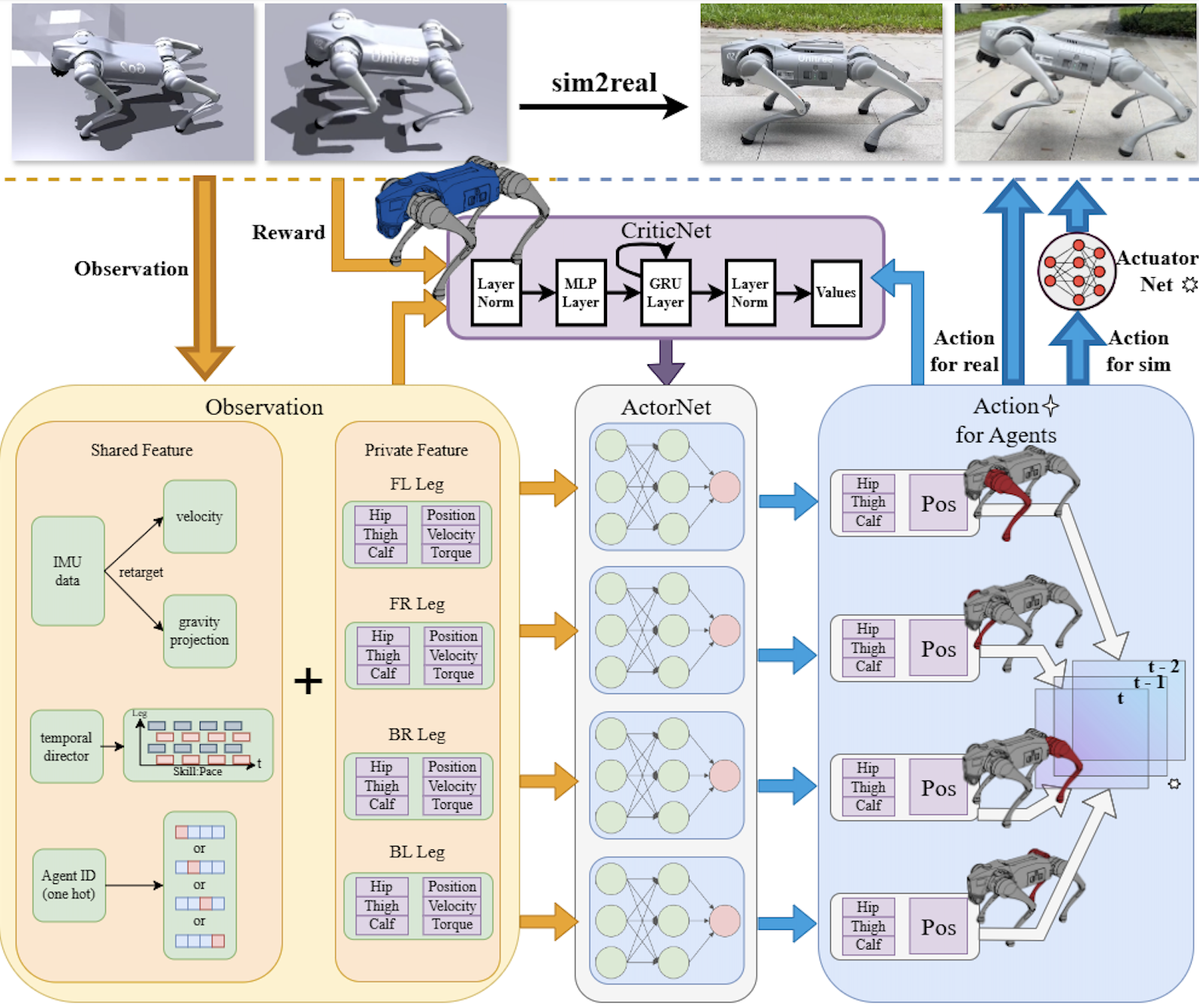
MASQ: Multi-Agent Reinforcement Learning for Single Quadruped Robot Locomotion
In submission arXiv / Video / Press
TL;DR:
Introduce MASQ, a novel approach using multi-agent reinforcement learning (MARL) for single quadruped robot locomotion. By treating each leg as an independent agent, MASQ accelerates learning and boosts real-world robustness, surpassing traditional methods.
|
|
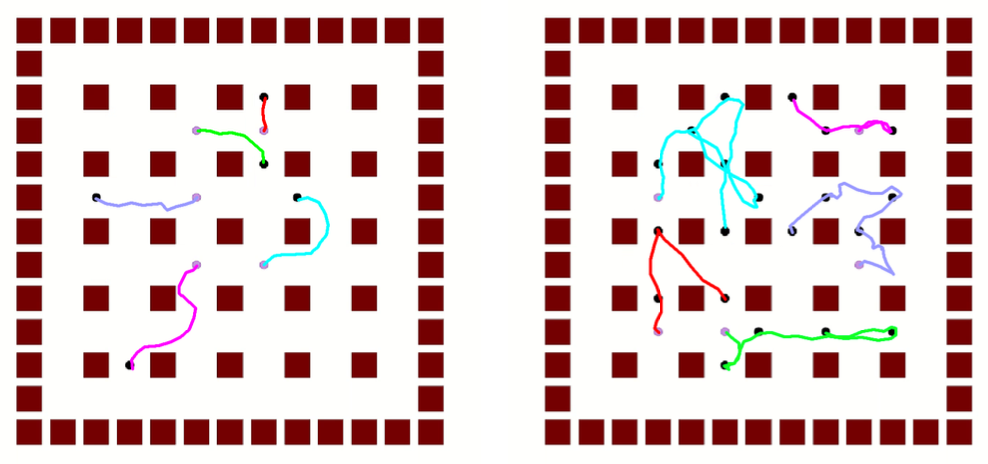
Multi-Agent Target Assignment and Path Finding for Intelligent Warehouse: A Cooperative Multi-Agent Deep Reinforcement Learning Perspective
In submission to IROS arXiv / Code / Press |
|
Logarithmic Function Matters Policy Gradient Deep Reinforcement Learning
⭐️ Accepted in DAI 2024 (Oral) ⭐️ arXiv / Code |
|
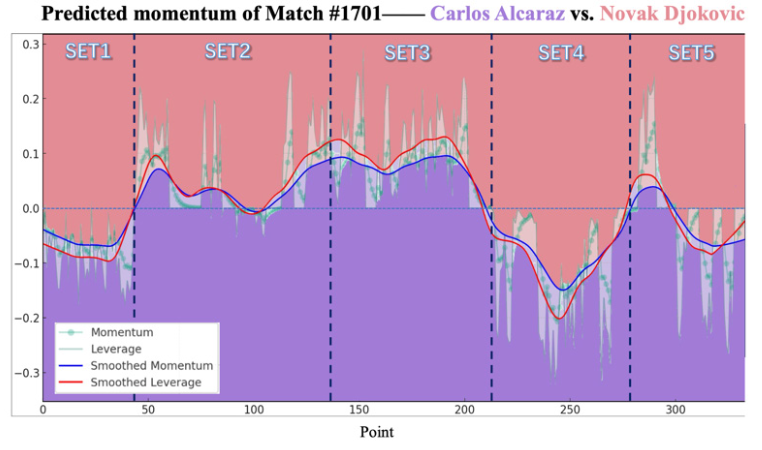
Momentum Prediction for Tennis Matches Based on Counter-Factual Analysis and Multi-LGBM
IEEE Xpolre / Code |
|
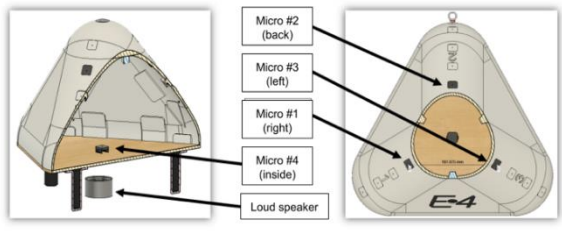
ECAPA-TDNN Embeddings for Speaker Recognition
IEEE Xpolre / Code |
|
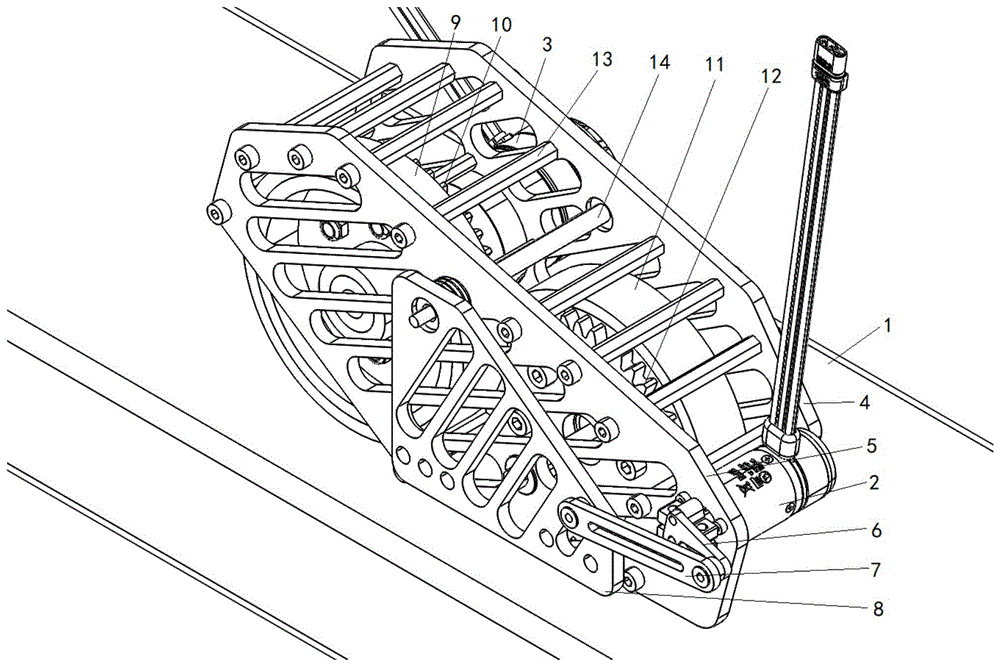
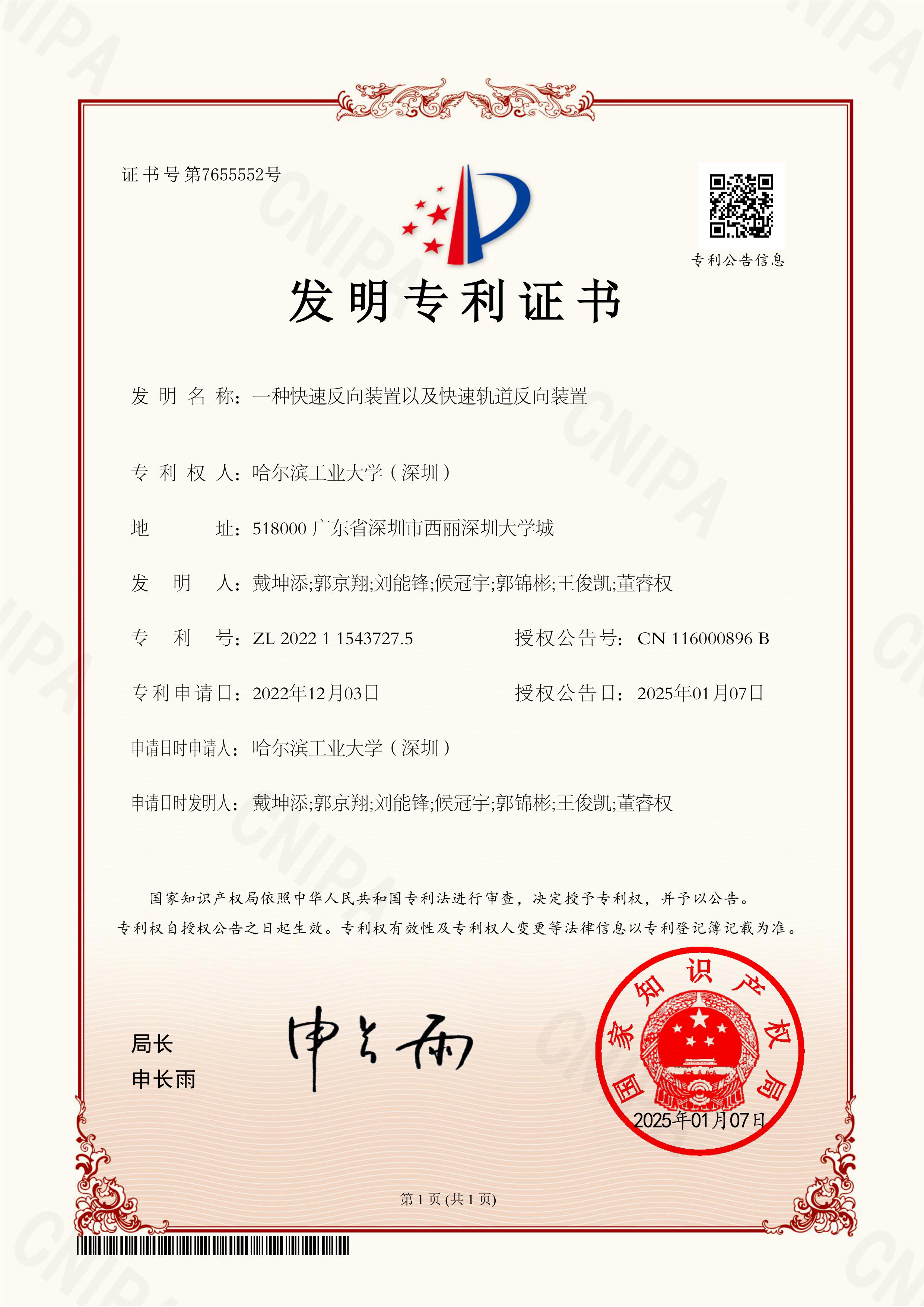
Quick reversing device and quick track reversing device
National Patent Google Patents / Certificate
×
|
Award
|
Experience |
|
National University of Singapore, Singapore 2024.07 - nowResearch AssistantAdvisor: Prof. Lin Shao |

|
HTISZ Reinforcement Learning Group (RLG), China 2022.10 - 2024.06Research InternAdvisor: Prof. Yanjie Li |
|
Harbin Institute of Technology, Shenzhen, China 2021.09 - 2025.07Undergraduate Student |
|
Fell free to contact me if you have any problem.
Thanks for your visiting😊!
Total Page Views:
|